
สวัสดีครับ ขอต้อนรับทุกท่านสู่เรื่องราวของยานยนต์ไฟฟ้าในตอนที่ 6 ซึ่งเราจะลงลึกในรายละเอียดทางเทคนิคกันสักนิดนะครับเพื่อน ๆ นักอ่านที่รัก

สวัสดีเพื่อน ๆ ชาว Modern Manufacturing ที่รักทุกท่าน ช่วงนี้เราทุกคนต่างก็ได้รับความเดือดร้อนจากเจ้าไวรัส Covid-19 ที่กำลังระบาดอยู่ทั่วประเทศ เจ้าไวรัสนี้มันติดง่ายแต่หายยากโดยเฉพาะคนแก่ คนที่มีโรคประจำตัว ซึ่งเป็นประเด็นที่ทำให้การสาธารณสุขในประเทศเรากลัวเป็นอย่างมาก ในช่วงที่เริ่มระบาดใหม่ ๆ ก็มีผู้ติดเชื้อในช่วงหลักสิบ แต่มาเยอะขึ้นจากเหตุการณ์ระบาดที่สนามมวยลุมพินี ซึ่งมีผู้เข้าชมในวันนั้นจำนวนมากและเซียนมวยไม่ยอมกักตัว เปิดเผยตัว ปิดบังการรายงานว่าตนเองไปที่สนามมวยในวันดังกล่าว ทำให้เชื้อแพร่กระจายออกไปเร็ว และอีกเหตุการณ์หนึ่งคือการประกาศ พรก. ฉุกเฉินแต่ไม่บังคับใช้ทันทีและไม่มีมาตรการมารองรับ ทำให้คนต่างจังหวัดที่สถานประกอบการปิด รีบเดินทางกลับบ้าน เชื้อจึงเดินทางจาก กทม. ไปยังภูมิภาคต่างๆอย่างที่เห็น การจัดการทำได้ยากยิ่งขึ้นเนื่องจากทรัพยากรและบุคลากรสาธารณสุขในต่างจังหวัดมิได้มีมากเท่ากับกรุงเทพฯ
เหมือนเป็นรูปแบบบทความของผมซึ่งต้องมีประเด็นทางสังคมในขณะนั้นมาด้วยเสมอ มาเข้าเรื่องกันดีกว่าครับ
ไดร์ฟสำหรับมอเตอร์เหนี่ยวนำ
จากที่ได้กล่าวไว้ใน EP.05 ว่าในการขับเคลื่อนยานยนต์ไฟฟ้า ไดร์ฟมอเตอร์ที่ไม่ใช้คอมมิวเตเตอร์นั้นมีข้อดีมากกว่าไดร์ฟมอเตอร์กระแสตรง โดย ณ ปัจจุบันไดร์ฟของมอเตอร์เหนี่ยวนำเป็นเทคโนโลยีที่มีการทดสอบใช้งานกันมานานมากที่สุดเหนือกว่าไดร์ฟของมอเตอร์ที่ไม่ใช้คอมมิวเตเตอร์ชนิดอื่นๆ เครื่องกลไฟฟ้าชนิดเหนี่ยวนำแบ่งเป็น 2 ประเภท คือ
- Wound-rotor
- Squirrel-cage
แต่ด้วยเหตุผลด้านการบำรุงรักษาและความทนทานจึงทำให้มอเตอร์ชนิด Wound-rotor มีความน่าสนใจน้อยกว่ามอเตอร์เหนี่ยวนำชนิด Squirrel-cage โดยเฉพาะเมื่อต้องนำมาใช้ในระบบขับเคลื่อนของยานยนต์ไฟฟ้า
รูปแบบของระบบ

ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
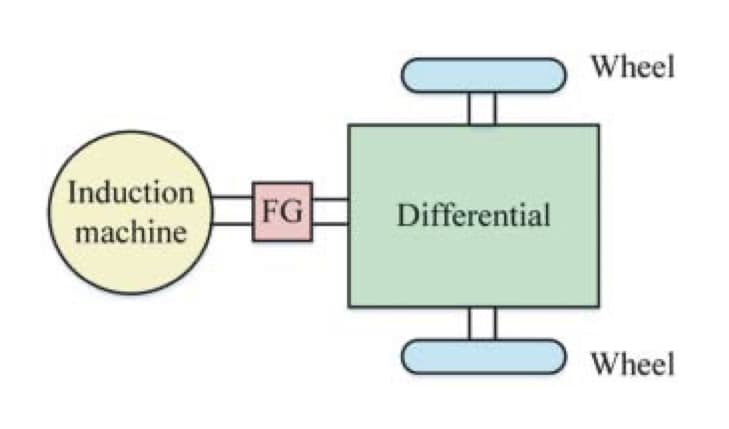
รูปแบบอย่างง่ายของไดร์ฟมอเตอร์เหนี่ยวนำเป็นไปตามรูปที่ 1 ซึ่งประกอบด้วยมอเตอร์เหนี่ยวนำชนิด Squirrel-cage (ต่อไปจะเรียกสั้นๆว่ามอเตอร์เหนี่ยวนำ) อินเวอร์เตอร์ 3 เฟสชนิด Pulse Width Modulation วงจรคอนโทรลและเซ็นเซอร์
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
ระบบขับเคลื่อนของยานยนต์ไฟฟ้าอาจจะใช้มอเตอร์ตัวเดียวหรือหลายตัวก็ได้ แต่ที่นิยมใช้กันมากที่สุดคือมอเตอร์เหนี่ยวนำตัวเดียวตามรูปที่ 2 ซึ่งใช้มอเตอร์เหนี่ยวนำ 1 ตัว อินเวอร์เตอร์ชนิด PWM 1 ตัว ทำให้น้ำหนัก ขนาดและราคาลดลงได้แต่ต้องใช้เฟืองเพื่อปรับความเร็วของล้อ 2 ข้างในขณะเข้าโค้งหรือเลี้ยว โดยทั่วไปจะใช้เกียร์เพื่อลดความเร็วของมอเตอร์ให้เหมาะกับความเร็วของล้อ
ในการออกแบบระบบขับเคลื่อนยานยนต์ไฟฟ้ามักจะใช้มอเตอร์เหนี่ยวนำความเร็วรอบสูงๆเนื่องจากช่วยลดขนาดและน้ำหนักของมอเตอร์ลงได้เป็นอย่างมาก
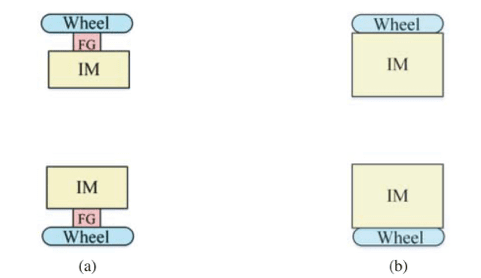
(a) โครงสร้างแบบทดเกียร์สำหรับมอเตอร์รอบสูง
(b) โครงสร้างแบบไม่ใช้เกียร์สำหรับมอเตอร์รอบต่ำ
ระบบขับเคลื่อนอีกรูปแบบหนึ่งที่มีการนำมาใช้งานคือระบบที่ใช้มอเตอร์หลายตัวขับเคลื่อนแต่ละล้อ ตามรูปที่ 3 เป็นการใช้ไดร์ฟมอเตอร์เหนี่ยวนำที่ประกอบด้วยมอเตอร์เหนี่ยวนำและอินเวอร์เตอร์ชนิด PWM อย่างละ 2 ชุดอาจจะใช้เกียร์หรือไม่ก็ได้ขึ้นอยู่กับว่ามี Direct Drive หรือไม่ เนื่องจากการขับเคลื่อนในลักษณะนี้ควบคุมมอเตอร์เหนี่ยวนำ 2 ตัวแยกจากกันทำให้สามารถควบคุมการหมุนของล้อในช่วงเข้าโค้งให้ไม่เท่ากันได้จึงไม่ต้องใช้เฟืองที่ใหญ่และมีน้ำหนักมาก การพิจารณาว่าจะนำเอารูปแบบระบบขับเคลื่อนด้วยมอเตอร์หลายตัวมาใช้หรือไม่ต้องพิจารณาในเรื่องความปลอดภัยเป็นอันดับแรกเนื่องจากว่าถ้าคำสั่งควบคุมความเร็วของมอเตอร์เหนี่ยวนำมีการคำนวณผิดพลาดหรือขาดหายไปจะเป็นอันตรายมากหากอยู่ระหว่างการเข้าโค้ง
มอเตอร์เหนี่ยวนำ
มอเตอร์เหนี่ยวนำมี 2 แบบคือ Squirrel Cage และ Wound Rotor ซึ่งในระบบขับเคลื่อนของยานยนต์ไฟฟ้าจะใช้มอเตอร์เหนี่ยวนำแบบ Squirrel Cage เท่านั้นตามที่ได้กล่าวมาแล้ว
โครงสร้างของมอเตอร์เหนี่ยวนำ
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
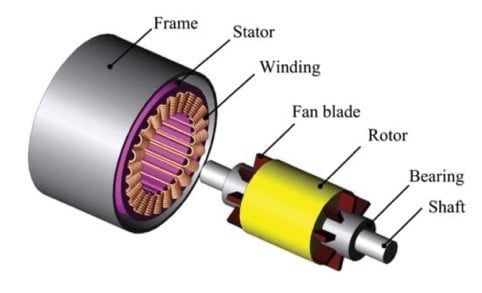
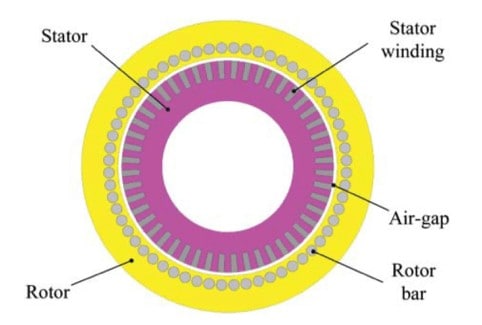
มอเตอร์เหนี่ยวนำแบบ Squirrel Cage แสดงดังรูปที่ 4 ประกอบด้วย ขดลวดอาเมเจอร์ (Armature) 3 เฟสติดตั้งที่สเตเตอร์ ที่โรเตอร์มีลักษณะเป็นแท่งตัวนำที่ลัดวงจรด้านหัวและท้ายโดยอาจเชื่อมต่อกับใบพัดเพื่อช่วยระบายความร้อนของมอเตอร์ในขณะหมุนได้อีกทางหนึ่ง
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
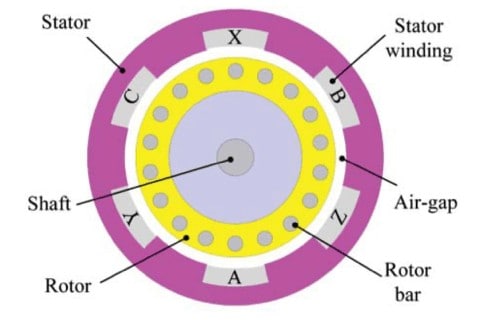
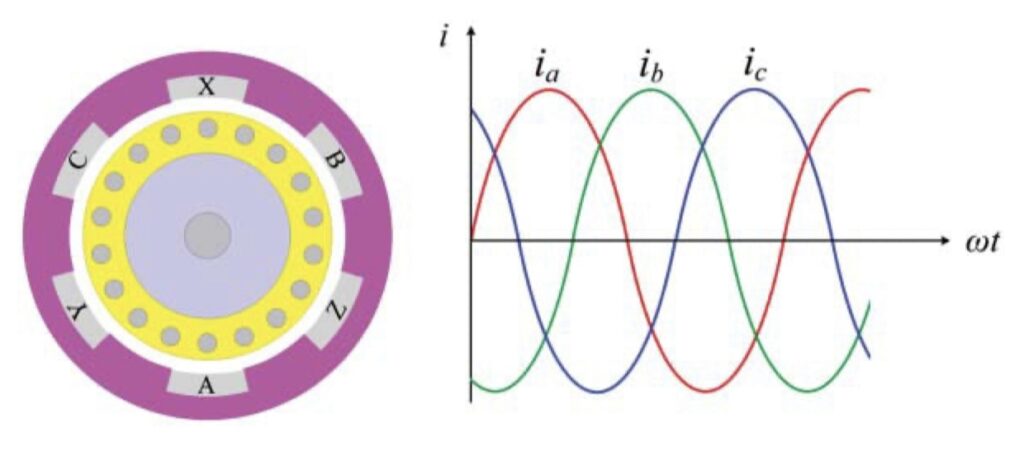
รูปที่ 5 แสดงภาคตัดของมอเตอร์เหนี่ยวนำ 3 เฟส 2 ขั้วโดยติดตั้งขดลวด 3 เฟส A-X B-Y และ C-Z ที่สเตเตอร์ ส่วนที่โรเตอร์แทรกด้วยแท่งทองแดงกลม การเรียงตัวของขดลวดที่สเตเตอร์เป็นไปในลักษณะที่ทำให้เกิดฟลักซ์เหนี่ยวนำรูป Sinusoidal ขึ้นที่ Air Gap เกิดกระแสเหนี่ยวนำขึ้นที่แท่งทองแดงบนโรเตอร์ซึ่งลัดวงจรหัวและท้าย ทำให้ที่โรเตอร์มีจำนวนขั้วเท่ากับสเตเตอร์
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
รูปที่ 6 แสดงมอเตอร์เหนี่ยวนำ 3 เฟสชนิดพิเศษที่มีโรเตอร์อยู่ด้านนอกจำนวน 16 ขั้ว หลักการทำงานก็เป็นเช่นเดียวกับมอเตอร์เหนี่ยวนำที่มีโรเตอร์อยู่ด้านใน การที่นำโรเตอร์มาอยู่ด้านนอกนี้เรียกว่าเป็นการออกแบบมอเตอร์เหนี่ยวนำแบบ Pancake เป็นมอเตอร์ที่มีเส้นผ่านศูนย์กลางใหญ่แต่แบนและมีจำนวนขั้วมาก ทำให้ง่ายต่อการนำมาติดตั้งกับล้อของยานยนต์ไฟฟ้า
หลักการทางคณิตศาสตร์ของมอเตอร์เหนี่ยวนำ
มาถึงส่วนที่น่าปวดหัวสำหรับท่านผู้อ่านกันแล้วครับ ผมจะนำเอาสมการบางส่วนที่สำคัญมาเพื่ออธิบายหลักการทำงานเท่านั้นครับ ท่านผู้อ่านอย่าเพิ่งเบื่อเสียก่อนนะครับ
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
รูปที่ 7 แสดงองค์ประกอบสำคัญ 2 ส่วนที่สร้างสนามแม่เหล็กเหนี่ยวนำให้แก่มอเตอร์เหนี่ยวนำคือ ขดลวดและกระแส 3 เฟส แทนค่าด้วยสมการ


โดย Im คือขนาดกระแสสูงสุดและ คือ ความถี่เชิงมุมของกระแส
แรงแม่เหล็กเหนี่ยวนำ (MMF) ที่สเตเตอร์ที่เกิดขึ้นจากกระแสมีค่าตามสมการ


โดย Fm=ImN N คือจำนวนรอบต่อเฟส ดังนั้นผลรวมของเวกเตอร์ MMF ที่สเตเตอร์ คือ

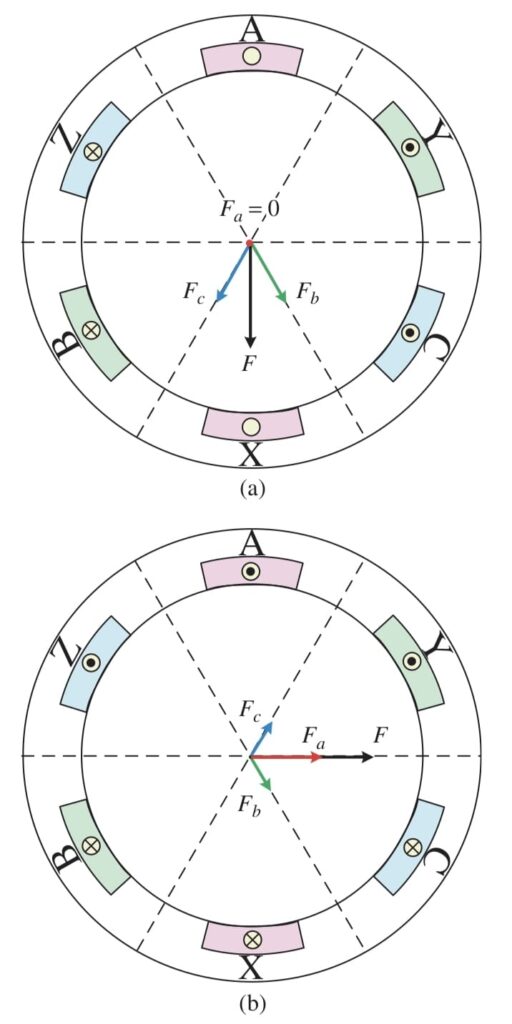
ซึ่งเวกเตอร์ของ MMF วิ่งตามแนวเส้นรอบวงด้วยความเร็วเชิงมุม และมีมุมตามหลัง MMF ของเฟส A อยู่ 90
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau,2015
รูปที่ 8 แสดงเวกเตอร์ MMF ของสเตเตอร์ที่ = 0 และ = 90 ซึ่งยืนยันได้ว่าเวกเตอร์ลัพธ์ของ MMF หมุนไป 90 องศา สอดคล้องกันกับจำนวนขั้วแม่เหล็กของสเตเตอร์ที่หมุนเป็นวงกลมด้วยความเร็วมุมเท่ากับความถี่เชิงมุมของกระแสเฟส ในกรณีที่เครื่องกลไฟฟ้ามีมากกว่า 2 ขั้วความเร็วเชิงมุมของสนามแม่เหล็กต่างจากความถี่เชิงมุมดังนี้
p คือจำนวนขั้ว f คือ ความถี่ของกระแสเฟส ws และ ns คือความเร็วของสนามแม่เหล็กหมุน (เรียกว่าความเร็วซิงโครนัส) หน่วย rad/s และ rev/s ตามลำดับ
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
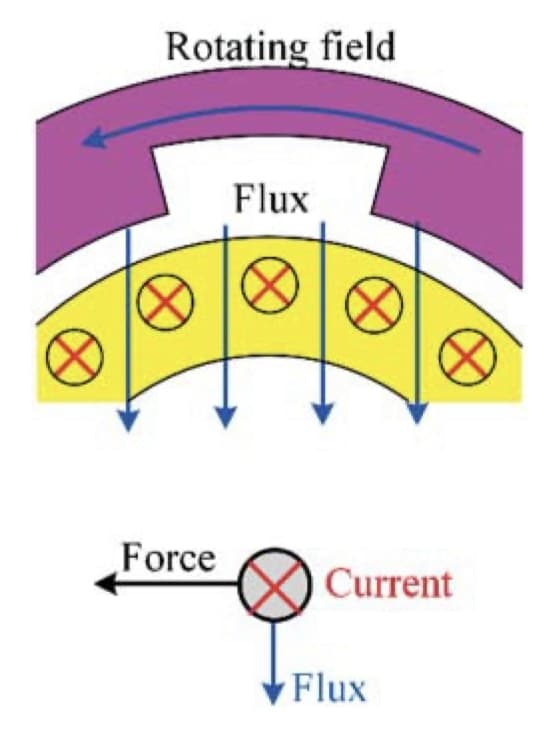
รูปที่ 9 การเคลื่อนที่ที่สัมพันธ์กันระหว่างสนามแม่เหล็กหมุนที่สเตเตอร์และขดลวดที่โรเตอร์เหนี่ยวนำให้เกิดแรงดันที่โรเตอร์ ยกตัวอย่างเช่น ถ้าฟลักซ์มีทิศทางลงและสนามวิ่งจากขวาไปซ้ายจะเหนี่ยวนำแรงทางไฟฟ้า (Electromotive Force) กระแสพุ่งเข้าหนังสือทำให้เกิดแรงไปทางซ้ายซึ่งจะดึงแกนโรเตอร์ให้หมุนไปในทิศทางเดียวกับสนามแม่เหล็กหมุน
เนื่องจากการเคลื่อนที่ของสนามแม่เหล็กหมุนและโรเตอร์เป็นปัจจัยสำคัญที่ทำให้เกิดทอร์กเวคเตอร์จึงเกิดนิยามของสลิป (Slip) ขึ้นดังนี้
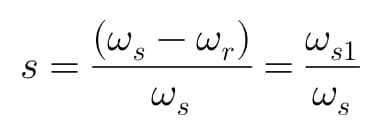
เป็นค่าความแตกต่างของความเร็วสนามแม่เหล็กหมุนในสเตเตอร์กับโรเตอร์ เครื่องกลไฟฟ้าเหนี่ยวนำจะทำงานในลักษณะเป็นมอเตอร์เมื่อ 0<s<1 และทำงานในลักษณะเป็นเจเนอเรเตอร์เมื่อ s<0
โมเดลจำลองของเครื่องกลไฟฟ้า
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
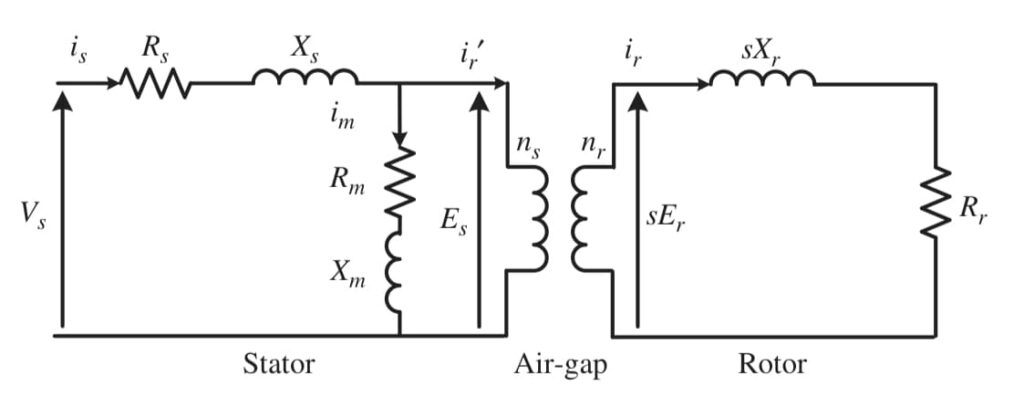
หลักการของเครื่องกลไฟฟ้าเหนี่ยวนำมีลักษณะเดียวกับหม้อแปลงไฟฟ้า วงจรสมมูลย์ของเครื่องกลไฟฟ้าเหนี่ยวนำแสดงในรูปที่ 10 โดย Rs และ Xs ความต้านทานของขดลวดและ Leakage Reactance (ขอใช้ภาษาอังกฤษครับ ไม่งั้นยิ่งแปลยิ่งปวดหัว) ของสเตเตอร์ Rr และ Xr คือความต้านทานของขดลวดโรเตอร์และ Leakage Reactance ของโรเตอร์ขณะหยุดอยู่กับที่
มีสมการทางคณิตศาสตร์อีกหลายขั้นตอนเพื่อที่จะหาค่าทอร์คของเครื่องกลไฟฟ้าเหนี่ยวนำได้เป็นสมการทอร์กเวคเตอร์ดังนี้
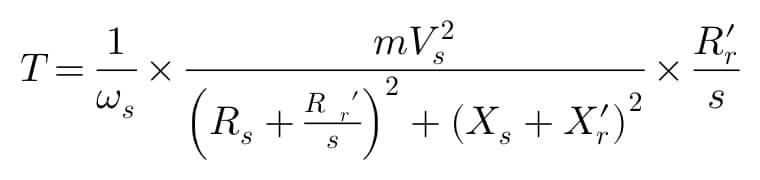
ที่มาภาพ: Electric Vehicle Machines and Drives, K.T. Chau, 2015
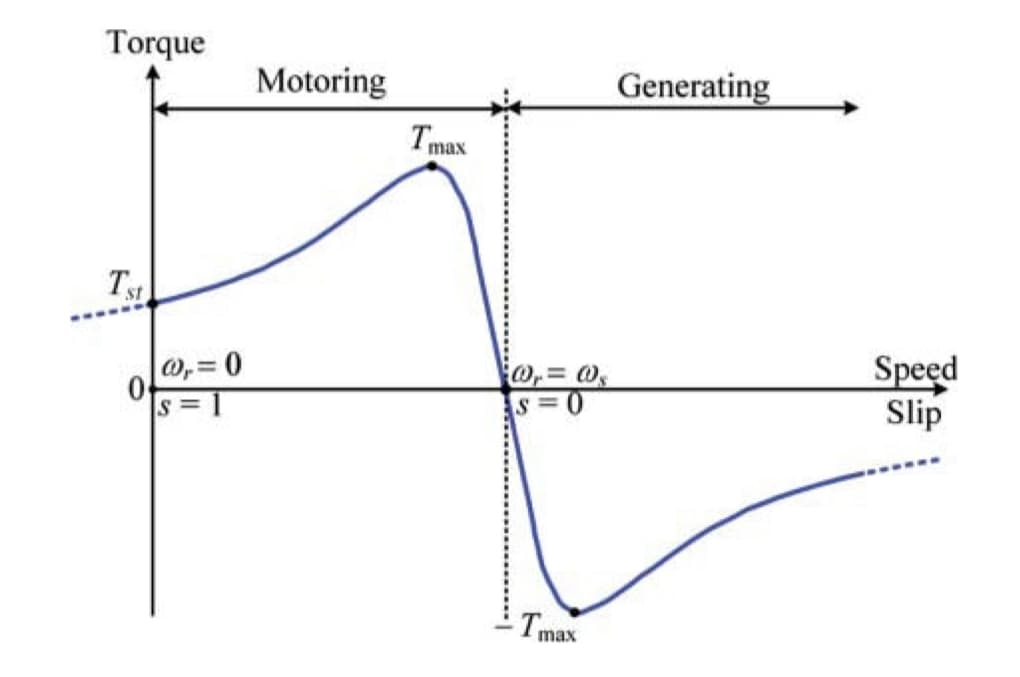
รูปที่ 11 แสดงคุณสมบัติทอร์กเวคเตอร์กับความเร็วของเครื่องกลไฟฟ้าเหนี่ยวนำที่แรงดันและความถี่คงที่ โดย Tst คือ ทอร์กเวคเตอร์ขณะเริ่มเดินและ Tmax คือ ค่าทอร์กสูงสุด จะเห็นได้ว่าคุณสมบัติของทอร์กเวคเตอร์กับความเร็วดังกล่าวไม่เหมาะที่จะนำมาใช้ขับเคลื่อนยานยนต์ไฟฟ้าเนื่องจากทอร์กเวคเตอร์ขณะเริ่มเดินต่ำและมีช่วงความเร็วจำกัด ดังนั้นการใช้งานอิเล็กทรอนิกส์กำลังกับเครื่องกลไฟฟ้าเหนี่ยวนำในการขับเคลื่อนยานยนต์ไฟฟ้าจึงมีอยู่ไม่กี่แบบและมีข้อจำกัดในการใช้งาน
เราจะมาต่อกันในเรื่องอินเวอร์เตอร์สำหรับมอเตอร์เหนี่ยวนำใน EP.07 ครับ
ขอให้ทุกท่านโชคดีไร้กังวลกับ Covid-19 ทั้งตัวท่านผู้อ่าน Modern Manufacturing และครอบครัวครับ







