อินเตอร์เฟสสั่งงานด้วยเสียงเป็นที่นิยมมากขึ้น เช่น ลำโพงอัจฉริยะ หูฟัง อุปกรณ์สวมใส่ สมาร์ทโฟน ยานยนต์ ฯลฯ ไมโครโฟนแบบ MEMS จาก Infineon คือเทคโนโลยีที่มุ่งตอบโจทย์การใช้งานนี้โดยเฉพาะ

การศึกษาวิจัยถึงเทคโนโลยีการผลิตและประยุกต์ใช้ Capacitive Microphone แบบ MEMS (หรือ Micro Electro-Mechanical System) ที่ Infineon เริ่มต้นขึ้นเมื่อเกือบสองทศวรรษที่ผ่านมาในปีค.ศ.1998 โดยเริ่มกับผลิตภัณฑ์กลุ่มยานยนต์ หลายปีถัดมาจึงมีการวิจัยพัฒนาอย่างกว้างขวางเพื่อผลิตแม่พิมพ์ไมโครโฟนบนซิลิคอน โดยใช้เทคโนโลยี Backplate* แบบแผ่นเดี่ยว (Backplate* หมายถึงแผ่นโลหะที่อยู่ด้านหลังไดอะแฟรมบนไมโครโฟนแบบคอนเดนเซอร์)
ความสำเร็จแบบก้าวกระโดดที่สำคัญเกิดขึ้นในปี ค.ศ.2012 เมื่อบริษัท Infineon เปิดตัวเทคโนโลยี Backplate แบบแผ่นคู่ที่ช่วยให้ไมโครโฟน MEMS แบบดิจิทัลมีประสิทธิภาพการทำงานสูงขึ้น พร้อมด้วยคุณสมบัติช้ันนำที่โดดเด่นกว่าคู่แข่งในท้องตลาด
ก่อนอื่นเรามาเริ่มต้นด้วยการทำความเข้าใจพื้นฐานของไมโครโฟน MEMS (Micro Electro-Mechanical System) จากชื่อแสดงให้เห็นว่าเซ็นเซอร์ของ MEMs ประกอบด้วยส่วนประกอบหลักสองส่วน ได้แก่
(i) โครงสร้างกลไกขนาดเล็กที่สั่นสะเทือนตามสัญญาณเสียงที่เข้ามา
(ii) ส่วนประกอบไฟฟ้าที่จะแปลงการสั่นสะเทือนทางกลเป็นสัญญาณไฟฟ้า
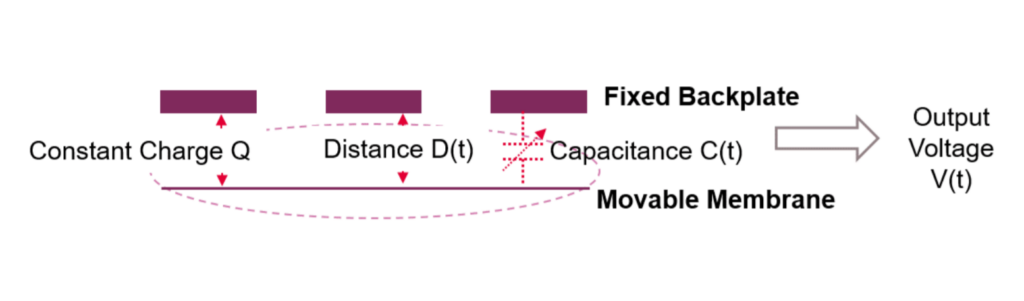
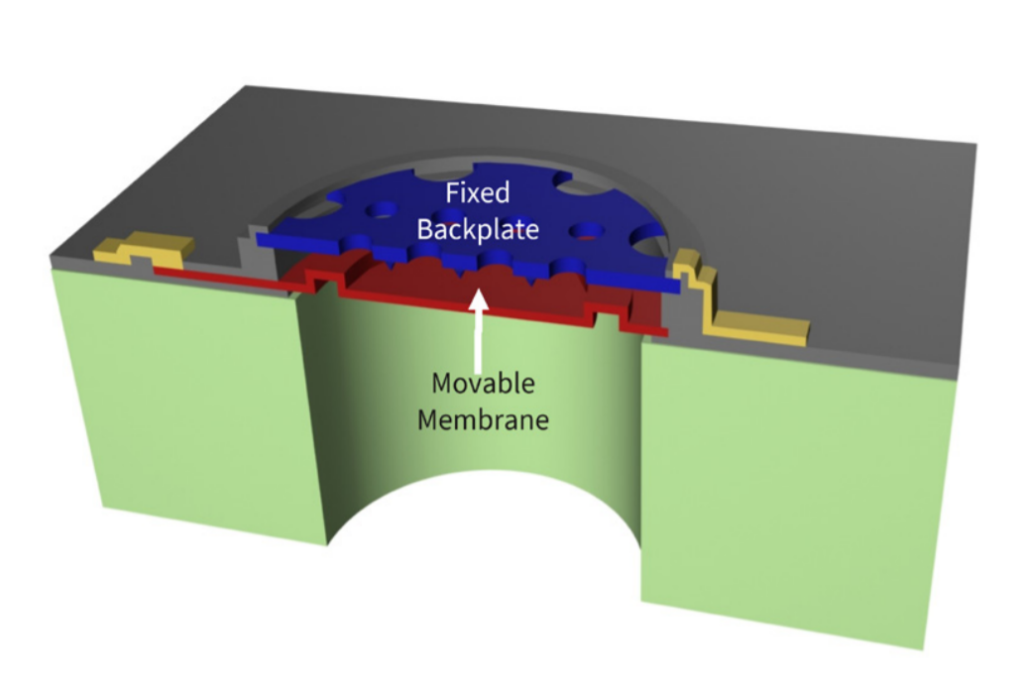
ดังในรูปภาพด้านล่าง โครงสร้างทางกลไกถูกสร้างขึ้น โดย Backplate และแผ่นเมมเบรนบาง ๆ โดยแผ่นเมมเบรนจะถูกชาร์จให้กลายเป็นตัวเก็บประจุไฟฟ้าร่วมกับ Backplate เมื่อมีสัญญาณเสียงเข้ามาจะเกิดการเปลี่ยนแปลงของความจุไฟฟ้าเนื่องจากการเคลื่อนไหวของแผ่นเมมเบรน จึงเกิดการแปลงสัญญาณออกมาเป็นแรงดันไฟฟ้าขาออก และเกิดการผลิตสัญญาณไฟฟ้า
ไมโครโฟน MEMS ให้ประสิทธิภาพเสียงระดับสูงพร้อมทั้งประโยชน์ต่าง ๆ เพิ่มเติมไม่ว่าจะเป็นขนาดที่เล็ก ต้นทุนที่ต่ำ และใช้พลังงานน้อย จึงทำให้ไมโครโฟนประเภทนี้เป็นตัวเลือกที่มีความนิยมมากกว่า ECM (Electret Condenser Microphone) แบบธรรมดา นอกจากนี้ไมโครโฟนประเภทนี้ยังมีข้อได้เปรียบในเรื่องความน่าเชื่อถือสูง เนื่องจากทนอุณหภูมิระดับสูงและยังผลิตได้ง่ายด้วยกระบวนการประกอบแผงวงจรแบบ Reflow ทั่วไป
อุปกรณ์ Smartphone เป็นตัวขับเคลื่อนสำคัญต่อการเจริญเติบโตอย่างก้าวกระโดดของตลาดไมโครโฟน MEMS ด้วยส่วนแบ่งทางการตลาดขนาดใหญ่ตามการใช้งาน อย่างไรก็ตาม ในช่วงไม่กี่ปีที่ผ่านมามีการประยุกต์ใช้งานอินเตอร์เฟสที่เปิดใช้งานด้วยเสียงมากมาย ได้แก่ ลำโพงอัจฉริยะ ชุดหูฟัง อุปกรณ์สวมใส่ รีโมทควบคุม แล็ปท็อป ยานยนต์ อุปกรณ์อิเล็กทรอนิกส์ทางการแพทย์ และ Consumer Electronics มากมาย
การมาถึงของ IoT และการขับเคลื่อนครั้งใหญ่สู่ยุค ‘smartification of anything – ความชาญฉลาดของทุกสรรพสิ่ง’ ได้กระตุ้นความต้องการของของไมโครโฟนประสิทธิภาพสูง
หน้าที่หลักของไมโครโฟนคือการรับเสียงโดยต้องไม่สูญเสียข้อมูลเสียงที่ต้องการ ไมโครโฟน MEMS จึงต้องมีคุณสมบัติหลักที่สำคัญดังนี้
- อัตราส่วนของสัญญาณต่อเสียงรบกวน (SNR: Signal to Noise Ratio) ที่สูงขึ้น ซึ่งเป็นตัวบ่งบอกว่าไมโครโฟนสามารถรับเสียงที่เบาที่สุดราวกับเสียงกระซิบได้หรือไม่
- ไมโครโฟนที่มีการรับเสียง Acoustic Overload Point (AOP) ระดับสูง จะสามารถบันทึกเสียงที่ดังราวกับเสียงในคอนเสิร์ตได้
- การตอบสนองความถี่ที่สมํ่าเสมอกันในทุกย่านความถี่จะทำให้บันทึกเสียงได้ชัดเจน และช่วยให้การปรับแต่งสัญญาณเสียงสะดวกและง่ายดายยิ่งขึ้น
อุปกรณ์เสียงส่วนใหญ่ที่เราพบเห็นกันในทุกวันนี้มักจะมีไมโครโฟนมากกว่าหนึ่งตัว เช่น สมาร์ทโฟนมีไมโครโฟน 2-4 ตัว ลำโพงอัจฉริยะมีไมโครโฟน 5-7 ตัว และชุดหูฟังแบบครอบหูมีไมโครโฟน 4-6 ตัว เป็นต้น
ซึ่งสิ่งที่ไมโครโฟน MEMS แตกต่างจาก ECM คือมีค่าความเบี่ยงเบนของประสิทธิภาพไมโครโฟนแต่ละตัวที่ต่ำมากอย่างมีนัยสำคัญ นั่นหมายความว่า ถ้าให้คุณสุ่มเลือกไมโครโฟนสองตัวจากจำนวนมากกว่า 100,000 ตัว ก็จะพบว่าประสิทธิภาพของไมโครโฟน MEMS มีความแตกต่างกันน้อยมาก ๆ เมื่อเทียบกับกลุ่มไมโครโฟน ECM


การเลือกไมโครโฟนและความสามารถที่จำเป็นนั้นขึ้นอยู่กับการใช้งาน เช่น ลำโพงอัจฉริยะที่วางไว้บนโต๊ะในห้อง นั่งเล่นจะต้องสามารถจับเสียงได้ 360° และสามารถระบุตำแหน่งของผู้ใช้งานเวลาพูดว่า ‘Hey Alexa’ หรือคำสำคัญอื่น ๆ ได้ หลังจากตรวจจับได้ว่ามีคำสั่งเกิดขึ้น ระบบประมวลผลสัญญาณจะสร้าง Audio Beam เพื่อจับเฉพาะเสียงของผู้ใช้งานเท่าน้ัน โดยอาศัยการลดเสียงรบกวนจากสภาพแวดล้อม

สำหรับการใช้งานดังกล่าว การจับคู่ Phase เสียงและค่าความไวระหว่างไมโครโฟนจึงเป็นสิ่งสำคัญอย่างยิ่งที่จะทำให้ระบบทั้งหมดทำงานได้ตามตั้งใจไว้ ในกรณีที่ประสิทธิภาพของไมโครโฟนแต่ละตัวไม่ตรงกันหรือมีความเบี่ยงเบน ก็จะมีความเป็นไปได้สูงที่ลำโพงอัจฉริยะนั้นจะไม่สามารถระบุตำแหน่งของผู้ใช้งานได้อย่างถูกต้อง และท้ายที่สุดก็จะทำให้เกิดสัญญาณคลื่นเสียง Audio Beam ในทิศทางที่ไม่ถูกต้อง ซึ่งจะส่งผลให้ผู้ใช้งานเกิดความหงุดหงิดที่จะต้องออกคำสั่งหรือคำถามซ้ำหลายครั้ง กว่าที่ลำโพงอัจฉริยะจะสามารถเข้าใจได้อย่างถูกต้อง
อีกตัวอย่างหนึ่งของการใช้งานที่สำคัญคือ ชุดหูฟัง
โดยเฉพาะอย่างยิ่ง หูฟัง Earbud แบบ True Wireless Stereo – TWS ที่กำลังเป็นที่นิยมและเติบโตเป็นอย่างมาก Earbud แต่ละข้างอาจใช้งานไมโครโฟน MEMS มากถึง 3 ตัว (นั่นคือ ใช้ไมโครโฟน 6 ตัวต่อชุด) เพราะคุณสมบัติสำคัญที่ต้องการก็คือแยกเสียงรบกวนออกจากสภาพแวดล้อมเพื่อให้ได้ประสบการณ์การฟังเพลงที่ดียิ่งขึ้น โดยในระหว่างการฟังเพลงไมโครโฟนด้านนอกจะทำงานร่วมกับไมโครโฟนด้านในเพื่อลดเสียงรบกวนภายนอก (เช่น ในเครื่องบิน เป็นต้น) โดยใช้เทคนิคการหักล้างเสียงรบกวน (ANC: Active Noise Cancellation) และเทคนิคการลดเสียงรบกวนอื่น ๆ ที่จับได้ ด้วยเหตุนี้จึงจำเป็นต้องใช้ไมโครโฟนที่มีขนาดเล็กเพื่อประหยัดพื้นที่ และมีประสิทธิภาพเสียงระดับสูงเป็นพิเศษเพื่อจับเสียงที่จะถูกตัดออกไป

พฤติกรรมการใช้ ‘เสียงเป็นสื่อกลางในการสื่อสาร’ กับอุปกรณ์ Smart Devices ต่าง ๆ มีเพิ่มมากขึ้นเรื่อย ๆ และเป็นตัวขับเคลื่อนความต้องการในการใช้งานไมโครโฟนที่มีคุณภาพที่ดียิ่งขึ้น การสื่อสารนั้นเป็นกระบวนสองทางซึ่งประกอบด้วยการพูดและการฟัง ไมโครโฟนคุณภาพสูงจึงไม่ใช่เพียงแค่สามารถจับสัญญาณเสียงที่มีคุณภาพในขณะที่คุณพูด แต่จะต้องช่วยในการจับเสียงรบกวนจากรอบข้างเพื่อตัดเสียงรบกวนเหล่านั้น และทำให้ได้รับประสบการณ์การฟังที่ดียิ่งขึ้นสำหรับผู้ใช้งาน
บทสรุป
ยังไม่มีโซลูชันไมโครโฟนใดที่เหมาะสำหรับทุกการใช้งานที่แตกต่างกัน นักออกแบบจะต้องเลือกไมโครโฟนที่เหมาะสมที่สุดสำหรับการใช้งานอย่างรอบคอบ โดยพิจารณาตัวแปรและปัจจัยสำคัญทั้งหมด ได้แก่ noise ratio / dynamic range – ช่วงความดังของเสียงที่ตอบสนอง / ความไวต่อเสียง / ภาพรวมของ harmonic distortion / และความเข้ากันได้ของ amplitude/phase
ที่น่าสนใจมาก ๆ ก็คือ Infineon ได้พัฒนาบอร์ดสำหรับทดสอบการใช้งานแบบ Plug and Play ที่สามารถใช้ร่วมกับแพลตฟอร์ม Arduino และ Raspberry Pi เพื่อการสร้างระบบจำลองการสั่งงานด้วยเสียงได้อย่างรวดเร็วอีกด้วย