

นักวิจัยจากมหาวิทยาลัย California San Diego ได้พัฒนาหุ่นยนต์ที่สามารถผลิตได้จากการพิมพ์ 3 มิติและเคลื่อนไหวได้โดยไม่ต้องการไฟฟ้าด้วยวัสดุที่ยืดหยุ่น และอ่อนนุ่ม ซึ่งเป็นการพิมพ์โดยวัสดุทั่วไปด้วยเครื่องพิมพ์มาตรฐาน สะท้อนความก้าวหน้าในงานออกแบบทางวิศวกรรมที่จะเปิดทางสู่การใช้งานใหม่ ๆ ในอนาคต
ตั้งต้นจากความเรียบง่าย สู่หุ่นยนต์ต้นแบบที่ทำงานได้อย่างต่อเนื่องยาวนาน
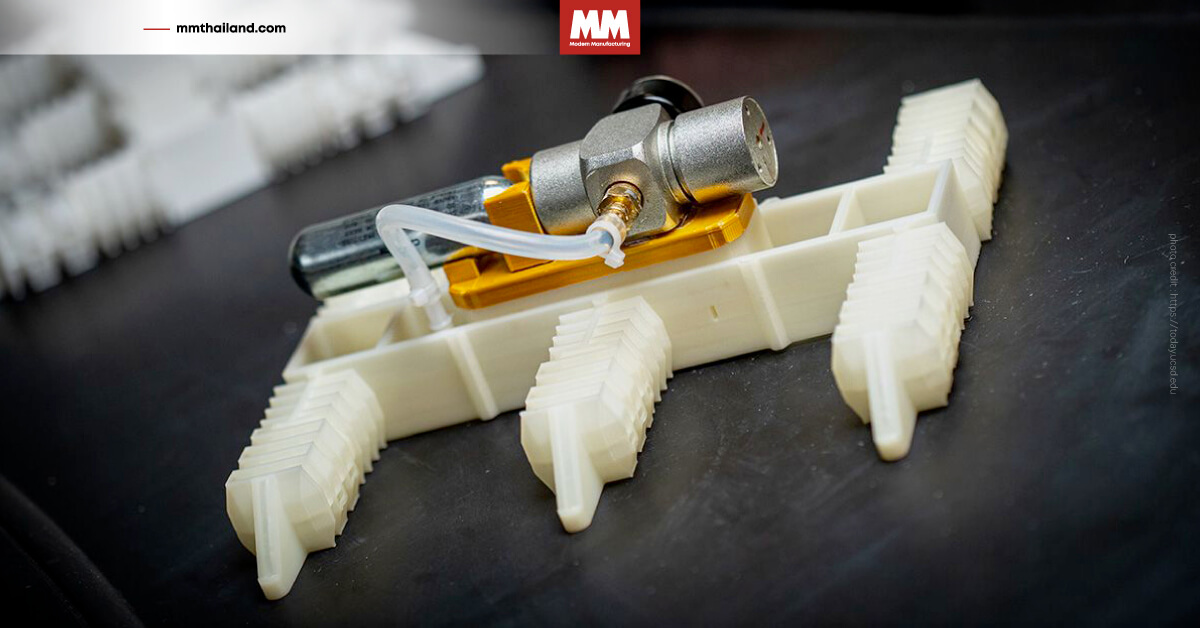
หุ่นยนต์ 6 ขาตัวใหม่ที่ถูกพัฒนาและถูกเผยแพร่ผ่านวารสาร Advanced Intelligent Systems ในชื่อ ‘Monolithic Desktop Digital Fabrication of Autonomous Walking Robots’ นั้น สามารถเคลื่อนที่ได้โดยการใช้ตลับก๊าซอัดอากาศติดตั้งเข้ากับหุ่นยนต์ 6 ขาที่ถูกพิมพ์ขึ้นมาในครั้งเดียว จากวัสดุประเภทเดียว ซึ่งมีทั้งความทนทานและมีต้นทุนที่ต่ำเพียง 20 ดอลลาร์สหรัฐฯ ในการผลิต จากกาารทดสอบทำให้เห็นว่าหุ่นยนต์ในงานวิจัยนี้สามารถทำงานได้อย่างต่อเนื่องยาวนานถึง 3 วันเมื่อมีการเชื่อมต่อกับอากาศหรือก๊าซที่มีแรงดันคงที่ เหมาะสำหรับการใช้งานในบริบทที่ไม่สามารถใช้เทคโนโลยีอิเล็กทรอนิกส์ได้ เช่น การทำงานด้านวิทยาศาสตร์ในพื้นที่ทีมีรังสีเข้มข้น หรือใช้ในการตอบสนองต่อสถานการณ์ฉุกเฉิน ตลอดจนการสำรวจอวกาศ
กุญแจสำคัญของงานวิจัยหุ่นยนต์ Robot อยู่ที่ออกแบบกล้ามเนื้อประดิษฐ์และระบบควบคุม
ในการทดสอบของทีมวิจัยนั้นพบว่า หุ่นยนต์สามารถเดินในพื้นที่นอกอาคารได้ สามารถทำงานบนพื้นผิวที่แตกต่างกันได้ ไม่ว่าจะเป็นทราย, สนามหญ้า หรือแม้กระทั่งทำการเดินใต้น้ำก็เกิดขึ้นได้เช่นกัน
แม้ว่าจะมีการตั้งเป้าว่าเป็นหุ่นยนต์ที่สามารถเดินได้ทันทีที่ออกจากเครื่องพิมพ์ แต่หุ่นยนต์ในงานวิจัยนี้ยังถูกออกแบบให้สามารถใช้งานกับแหล่งพลังลมได้อย่างมีประสิทธิภาพ ผ่านวัสดุนุ่มที่ยืดหยุ่นได้โดยใช้เทคโนโลยีและวัสดุทั่วไปที่สามารถหาใช้งานได้ในการผลิต หรือแม้แต่กลุ่มของเหล่า Maker ก็ตาม
งานวิจัยที่ขับเคลื่อนหุ่นยนต์ด้วยเงื่อนไขเชิงกล
ความท้าทายสำคัญในงานวิจัยนี้ คือ การออกแบบหุ่นยนต์ที่ต้องรวบรวมเอากล้ามเนื้อประดิษฐ์และระบบควบคุมเอาไว้ด้วยกัน ทั้งหมดถูกพิมพ์ด้วยวัสดุอ่อนนุ่มแบบเดียวกันทั้งหมดในการพิมพ์ครั้งเดียว โดยตั้งต้นจากเทคนิคในการพิมพ์ 3 มิติที่เคยใช้ในกรผลิต Gripper แบบปราศจากระบบอิเล็กทรอนิกส์ ทำให้เกิดเป็นหุ่นยนต์ 6 ขา
ในการเคลื่อนที่ของหุ่นยนต์ 6 ขาจากงานวิจัยนี้ ทีมวิจัยได้สร้างวงจร Pneumatic Oscillating เพื่อควบคุมการเคลื่อนไหวซ้ำ ๆ จาก Actuator แบบอ่อนนุ่ม คล้ายกับกลไกการทำงานของหัวรถจักรไอน้ำ วงจรที่เกิดขึ้นจะเป็นการทำงานร่วมกันของวงจรทั้ง 6 ขาโดยการส่งแรงดันอากาศในช่วงเวลาที่ถูกต้องเพื่อสลับการเคลื่อนที่ระหว่างขาทั้ง 2 ชุด ซึ่งเป็นชุดละ 3 ขา ซึ่งขาของหุ่นยนต์นั้นมีความสามารถในการขับเคลื่อนด้วย 4 องศาอิสระ ขึ้น, ลง, ไปข้างหน้า และไปข้างหลัง ทำให้หุ่นยนต์สามารถเดินเป็นเส้นตรงได้
การขับเคลื่อนดังกล่าวจำเป็นต้องมีกลไกปรผันเพิ่มเติม ในที่นี้คือ ก๊าซอัดอากาศ ทำให้กาาารวางแผนและนำระบบก๊าซอัดอากาศใส่ไว้ในหุ่นยนต์จึงเป็นเรื่องสำคัญ ซึ่งการเลือกใช้วัสดุที่สามารถรีไซเคิลหรือ Biodegradable ได้ก็มีส่วนสำคัญเช่นกัน ภายใต้เงื่อนไขที่เกิดขึ้นทีมนักวิจัยยังคงหาหนทางที่จะเพิ่มอุปกรณ์ในการหยิบจับตอบสนองอย่าง Gripper เข้าไปด้วยเช่นกัน
ที่มา:
Uscd.edu







