Skip to main content
Skip to footer
Search...
Home
Automation
Sustainability
Digital Factory
Machining
Management & Productivity
More
Fabrication
Investment
Measuring
News & Events
Video
Directory & Product
Business Profile
Products & Services
Search
Home
Automation
Motion & Control Technology
Intralogistics, logistics automation, handling & assembly
System Integration & Integrated Solutions
Robotics / Cobot & Accessories
Sensor Technology
AI
Vision Technology
Sustainability
Waste Management
Energy Management
Solar Cell
Battery Storage
Power & Energy
Carbon Footprint Measurement
Digital Factory
Cloud Computing
Cybersecurity
IIoT
Edge Computing
ERP
Digital Twin
AR VR
Machining
Grinding Machine
Milling Machine
Drilling Machine
Cutting tools
Machine Tool
Management & Productivity
Management
Productivity
Skill & Training
Safety
More
Fabrication
Investment
Measuring
News & Event
Videos
Business Directory
Business Profile
Products & Services
Home
Automation
Motion & Control Technology
Intralogistics, logistics automation, handling & assembly
System Integration & Integrated Solutions
Robotics / Cobot & Accessories
Sensor Technology
AI
Vision Technology
Sustainability
Waste Management
Energy Management
Solar Cell
Battery Storage
Power & Energy
Carbon Footprint Measurement
Digital Factory
Cloud Computing
Cybersecurity
IIoT
Edge Computing
ERP
Digital Twin
AR VR
Machining
Grinding Machine
Milling Machine
Drilling Machine
Cutting tools
Machine Tool
Management & Productivity
Management
Productivity
Skill & Training
Safety
More
Fabrication
Investment
Measuring
News & Event
Videos
Business Directory
Business Profile
Products & Services
STORIES: Cambridge University
Automation
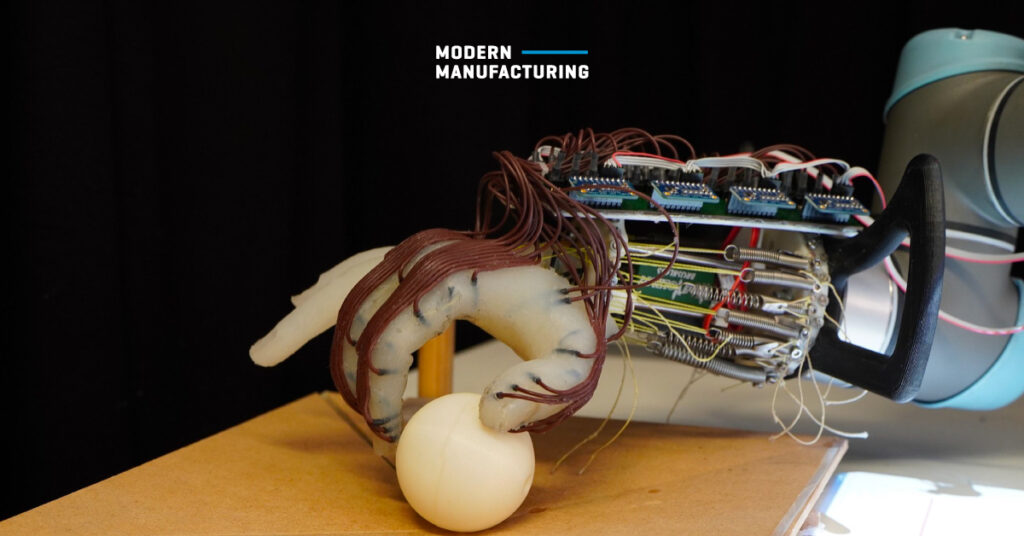
นักวิจัยพัฒนามือหุ่นยนต์ที่หยิบของได้โดยไม่หล่นพร้อม ๆ กับใช้พลังงานอย่างคุ้มค่า
นักวิจัยจาก Bio-Inspired Robotics Laboratory มหาวิทยาลัย Cambridge พัฒนามือหุ่นยนต์ที่มีต้นทุนต่ำ และมีการประสิทธิภาพในการใช้พลังงานสูง สามารถหยิบจับวัตถุได้หลากหลายรูปร่างโดยไม่ทำให้วัตถุนั้นร่…
Newsletter
Don't miss our best content
Subscribe Form
Email
Subscribe to newsletter