งาน Pick and Place ในโรงงานอุตสาหกรรมหรือคลังสินค้านั้นเรียกได้ว่าเป็นหนึ่งในกิจกรรมที่เกิดขึ้นมากที่สุด ซึ่งปัจจุบันนิยมใช้หุ่นยนต์หรือเครื่องจักรเพื่อทำงานรูปแบบดังกล่าวเป็นจำนวนมาก แต่รู้กันหรือไม่ว่าอะไรเป็นเหตุผลเบื้องหลังการใช้เทคโนโลยีเพื่องานง่าย ๆ เช่นนี้กัน?

Pick and Place คืออะไร
สำหรับงาน Pick and Place นั้นถ้าแปลกันตรงตัว คือ การหยิบยกวัตถุและการวาง ซึ่งในกระบวนการผลิต การแปรรูป แม้กระทั่งชีวิตประจำวันต่าง ๆ มนุษย์เราก็มีการยกของวางของเพื่อย้ายตำแหน่งกันเป็นปรกติ การเปลี่ยนตำแหน่งย้ายวัตถุดิบหรือชิ้นงานในโรงงานเองก็ถือเป็นกิจกรรมที่พบเห็นได้ทั่วไปและโดยมากยังใช้มนุษย์เป็นผู้ดำเนินการอยู่ แต่มีข้อแม้ว่าการหยิบยกนั้น ๆ อาจจะไม่ได้มีความถี่ในการหยิบยกวางมากนัก แต่ถ้าหากเป็นสายการผลิตที่มีสินค้าจำนวนมาก หรือมีคุณสมบัติอื่นใดที่ไม่เหมาะกับร่างกายมนุษย์เมื่อนั้นเองจะเป็นการเข้ามาของหุ่นยนต์หรือเทคโนโลยี
ทำไมต้องใช้เครื่องจักรหรือหุ่นยนต์ในเมื่อคนก็ทำได้์?
แน่นอนว่าเกือบทุกกิจกรรมในโรงงานหรือสายการผลิตมนุษย์สามารถทำงานได้ แต่ถ้าต้องพิจารณาถึงผลลัพธ์ว่าสามารถทำได้ดีหรือเหมาะสมกับเงื่อนไขหรือไม่นั้นเป็นอีกประเด็นที่มีความสำคัญยิ่งกว่า ในการหยิบสิ่งของและวางภายใต้บริบทของการผลิตแบบอุตสาหกรรมที่ให้ความสำคัญกับปริมาณแล้วกิจกรรมที่เกิดขึ้นถือว่าเป็นภาระที่อันตรายของร่างกาย การทำงานซ้ำ ๆ เดิม ๆ ตลอดเวลาส่งผลกระทบต่อร่างกายและสภาพจิตใจของผู้ปฎิบัติงานตั้งแต่ความเหนื่อยล้าไปจนถึงโอกาสในการบาดเจ็บ ในแง่ของผลิตภาพความเหนื่อยล้าส่งผลต่อครั้งคุณภาพ ความผิดพลาดในการทำงาน และความล่าช้าที่เกิดขึ้น

ด้วยเหตุผลด้านความปลอดภัยของแรงงานและโอกาสของธุรกิจ ทำให้โรงงานและคลังสินค้าที่มีกำลังผลิตจำนวนมากหรือต้องมีการทำงานอย่างต่อเนื่องเป็นเวลานานหันมาใช้งานหุ่นยนต์กันมากขึ้น นอกจากนี้ในกรณีของโรงงานที่ต้องมีการขนย้ายสินค้าที่มีน้ำหนักมากหรือยากลำบากต่อการดำเนินการด้วยแรงงาน อาทิ ข้าวสารกระสอบหรือชิ้นส่วนอิเล็กทรอนิกส์ขนาดเล็ก ตลอดจนอุปกรณ์การแพทย์ในห้องปลอดเชื้อ โดยจุดเด่นของการใช้งานหุ่นยนต์สำหรับงาน Pick and Place ได้แก่
- ความเร็ว
- Productivity
- การผลิตที่ไร้การรบกวน
- ความสม่ำเสมอ
- ความปลอดภัย
- ROI
- Throughput
กิจกรรมยอดฮิตในการใช้งานหุ่นยนต์ Pick and Place
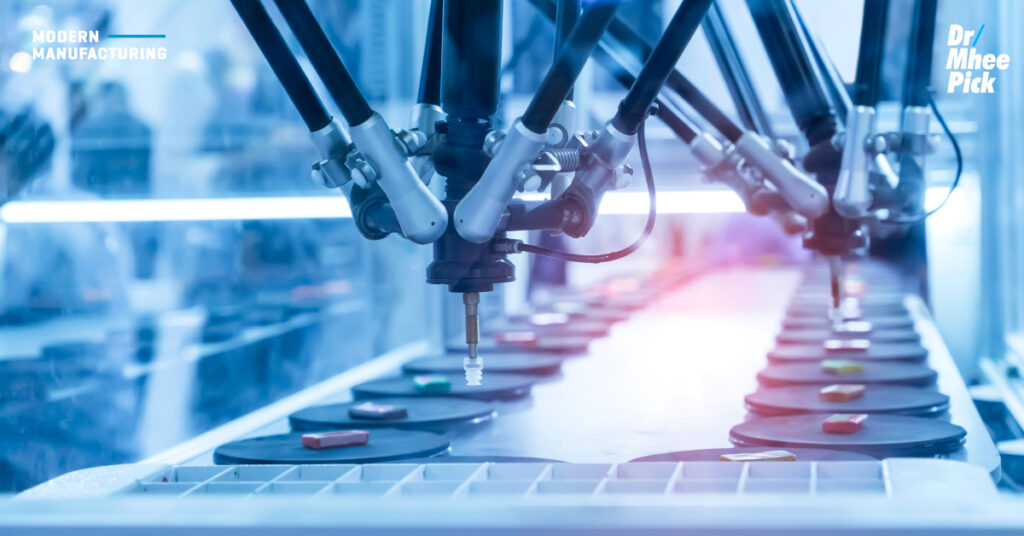
หุ่นยนต์ในอุตสาหกรรมนั้นมีหลากหลายประเภท หลายรูปแบบ รวมถึง EOAT หรือ End of Arm Tool ในการใช้งานที่แตกต่างกันออกไป โดยหุ่นยนต์ที่นิยมใช้ในงาน Pick and Place ได้แก่ หุ่น Cartesian, SCARA, Delta, Articulated และน้องใหม่ล่าสุดอย่าง Cobot
ต้องบอกว่างาน Pick and Place นั้นอยู่ในแทบทุกกิจกรรมการใช้งานหุ่นยนต์ แต่จะขอจัดกลุ่มรูปแบบที่เกี่ยวข้องไว้ 5 รูปแบบสำหรับภาคการผลิต ดังนี้
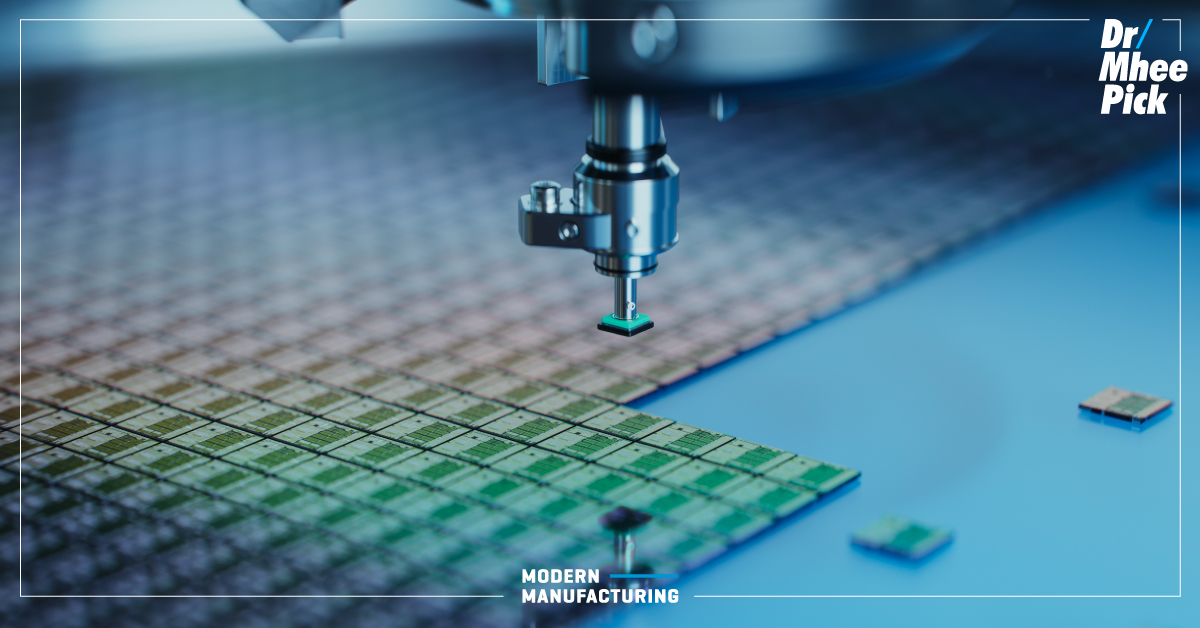
งานประกอบ – หุ่นยนต์ Pick and Place ฬนงานประกอบสาามารถหยิบชิ้นส่วนจากหลากหลายที่ประกอบพร้อมกันได้ในที่เดียว โดยเฉพาะงานที่มีความซับซ้อนอย่างชิ้นส่วนอิเล็กทรอนิกส์ซึ่งต้องการความละเอียดสูงเป็นต้น
งานด้านบรรจุภัณฑ์ – หุ่นยนต์เป็นเหมือนอุปกรณ์อรรถประโยชน์ในงานบรรจุภัณฑ์ ไม่ว่าจะหยิบอาหาร การกางกล่อง บรรจุลงกล่องลงบรรจุภัณฑ์ ตลอดจนการนำขึ้นพาเลทหรือใส่คอนเทนเนอร์ ซึ่งสามารถใช้งานได้จากทั้งหุ่นยนต์เคลื่อนที่ ระบบสายพาน หรือตัวเลือกอื่น ๆ อีกด้วย
การหยิบของแบบสุ่ม/เลือกชิ้นส่วน – ด้วยการติดตั้งเทคโนโลยีกล้อง ทำให้หุ่นยนต์สามารถเลือกหยิบชิ้นส่วนที่ต้องการจากถาดได้ ด้วยเทคโนโลยีกล้องสมัยใหม่ที่มีความแม่นยำสูงระบบจะสามารถระบุชิ้นส่วนที่ต้องการตลอดจนรูปแบบหรือ EOAT ในการหยิบได้ด้วยตัวเอง
งานตรวจสอบและควบคุมคุณภาพ – หุ่นยนต์ Pick and Place จะช่วยควบคุมคุณภาพได้ตามมาตรฐานด้วย ยกตัวอย่างเช่น การตัดชิ้นส่วนที่ไม่สมบูรณ์ออกจากสายการผลิตเป็นต้น
การจัดเรียง – การเรียงชิ้นส่วนหรือจัดเก็บอุปกรณ์ที่แตกต่างกันตามขนาดหรือข้อมูลที่ระบุบนวัตถุเป็นอีกหนึ่งความสามารถในการใช้งานคลังสินค้าสำหรับธุรกิจยุคใหม่
เทรนด์น่าจับตาสำหรับการใช้งานหุ่นยนต์ Pick and Place
ตลาดของหุ่นยนต์ Pick and Place นั้นมีแนวโน้มในการเติบโตระดับสูงในปีที่ผ่าน ๆ มา เป็นผลจากความต้องการระบบอัตโนมัติในหลากหลายอุตสาหกรรมที่เพิ่มขึ้น เช่น อุตสาหกรรมอาหาร เครื่องดื่ม ยานยนต์ และอิเล็กทรอนิกส์ โดยนิยมใช้ในกิจกรรมที่มีการทำงานซ้ำ ๆ อย่างต่อเนื่องซึ่งเป็นอันตรายต่อแรงงาน ด้วยการผลักดันของอุตสาหกรรม 4.0 และ IIoT คาดว่าจะทำให้เกิดการบูรณาการใช้งานได้มากขึ้นและสะดวกยิ่งขึ้น โดยเอเชียแปซิฟิกเป็นภูมิภาคที่มีแนวโน้มในการเติบโตที่ต้องจับตามอง
สำหรับความเปลี่ยนแปลงในด้านเทคโนโลยีที่เกี่ยวข้องนั้นจะสังเกตได้ว่าหุ่นยนต์ Cobot มีการเติบโตในการใช้งานที่เพิ่มขึ้นเป็นผลจากความปลอดภัยในการใช้งานร่วมกับแรงงาน ตลอดจนต้นทุนรวมที่ถูกกว่าหุ่นยนต์รูปแบบอื่น ๆ ในขณะที่เทคโนโลยีด้านกล้องจะเพิ่มความสามารถในการทำงานของหุ่นยนต์ Pick and Place ให้มีความหลากหลาย แม่นยำ และทำงานได้ใกล้เคียงมนุษย์มากยิ่งขึ้น โดยเฉพาะอย่างยิ่งหากบูรณาการร่วมกับปัญญาประดิษฐ์ (AI) ที่ทำให้หุ่นยนต์สามารถตอบสนองต่อสถานการณ์ล่วงหน้าได้อย่างมีประสิทธิภาพ ในขณะที่การออกแบบหุ่นยนต์สำหรับงาน Pick and Place นั้นมีลักษณะเป็น Modular มากขึ้น จึงสะดวกต่อการปรับแต่งและบูรณาการ ตลอดจนการซ่อมบำรุงก็สะดวกสบายยิ่งขึ้น ทั้งยังเปิดโอกาสให้ใช้งานร่วมกับเทคโนโลยีอื่น ๆ ได้ง่ายกว่าเดิมอย่างมากอีกด้วย
แม้ว่าแนวโน้มการใช้งานหุ่นยนต์สำหรับ Pick and Place จะเพิ่มมากขึ้นและเทคโนโลยีที่เกี่ยวข้องมีต้นทุนที่ถูกลงอย่างมากก็ตาม แต่กำแพงสำคัญยังคงหนีไม่พ้นมูลค่าการลงทุนที่ค่อนข้างสูง ในหลายกรณีการบูรณาการเข้ากับระบบหรือสายการผลิตเดิมที่มียังคงเป็นเรื่องยุ่งยากซับซ้อน ทั้งยังต้องการแรงงานฝีมือที่มีทักษะในการใช้งานตลอดจนซ่อมบำรุงอีกด้วย และที่สำคัญที่สุด คือ ความรู้สึกต่อต้านจากแรงงานเดิมหรือ Stakeholder ภายในองค์กรที่รู้สึกในด้านลบว่าหุ่นยนต์จะเข้ามาแทนที่งานของตัวเอง ซึ่งเป็นประเด็นใหญ่ที่ทำให้ธุรกิจจำนวนมากแม้ผู้บริหารจะมีเงินทุนและมีนโยบายการ Transformation แต่ผลลัพธ์ที่เกิดขึ้นก็ไม่สู้ดีนัก
อ้างอิง:
- www.amazon.science/blog/amazon-releases-largest-dataset-for-training-pick-and-place-robots
- www.automate.org/blogs/pick-and-place-robots-what-are-they-used-for-and-how-do-they-benefit-manufacturers
- www.machinedesign.com/markets/robotics/article/21122266/10-benefits-of-using-a-pickandplace-machine
- www.howtorobot.com/expert-insight/pick-and-place-robots
- www.pwrpack.com/what-is-a-pick-and-place-robot/
- www.linkedin.com/pulse/pick-place-robot-market-reach-usd-74-billion-2032-says-belva-ann